Free resources to learn about industrial and collaborative robots


Mapping of error codes is critically important for several reasons:
1. Interoperability: Different systems often use their own set of error codes to communicate issues.
Mapping these codes ensures that systems can understand and interpret errors generated by each other, enabling seamless communication and collaboration.
Imagine that a vision system raises an error with the code (201) for example, while the same code is already available in the robot for alarming low battery for example.
2. Troubleshooting: By mapping error codes between systems, technicians and engineers can quickly identify the root cause of an issue and take appropriate action to resolve it. This saves time and resources by streamlining the troubleshooting process.
3. Efficient Maintenance: With mapped error codes, maintenance personnel can easily diagnose problems and implement fixes without the need for extensive manual analysis or guesswork. This enhances overall system uptime and performance.

4. Data Analysis: Mapping error codes allows for the collection and analysis of error data across different systems. This data can be used to identify patterns, trends, and recurring issues, leading to improvements in system reliability and performance over time.
5. Risk Mitigation: Clear communication of error codes between systems helps prevent misunderstandings and misinterpretations that could lead to errors going unresolved or exacerbating existing problems.

While requesting the provider of the supportive system to adjust their error IDs seems like a logical solution, it may not always be feasible.
Providers may be hesitant to make changes, as doing so could require additional effort and resources on their part.
Additionally, even if the provider agrees to change the error IDs, it could introduce a new challenge: when troubleshooting issues, the provider may request error codes that are different from the ones they are accustomed to, leading to confusion and potential delays in problem resolution.
Moreover, overcoming this problem would necessitate a robust documentation system capable of managing and translating between different sets of error codes. However, creating such a system is often complex and resource-intensive, making it nearly impractical to implement effectively.
In essence, while aligning error IDs between systems may appear to be a straightforward solution, the practical challenges and potential complications involved highlight the need for careful consideration and alternative approaches to address the underlying issue of interoperability between systems.
In today’s technological landscape, leveraging programming expertise offers a powerful means to resolve various issues without the need for hardware alterations or restructuring system architectures.
A particularly effective strategy in this regard involves employing what is commonly referred to as a “mapping function” to reconcile error codes originating from the supportive system with those used within the robot.
This approach essentially empowers robot programmers to select and define error codes according to their preference, subsequently establishing a correspondence or mapping between error codes generated by external systems and those within the robot’s domain.
By implementing a mapping function, programmers can seamlessly translate error codes from the supportive system to align with the error codes recognized by the robot. This not only facilitates effective communication between disparate systems but also enables streamlined troubleshooting and problem resolution processes.
Furthermore, the flexibility inherent in this method empowers programmers to tailor error code mappings to suit specific requirements and preferences, thereby enhancing adaptability and efficiency in addressing system issues.
Harnessing programming skills to implement a mapping function represents a versatile and pragmatic solution for harmonizing error code systems across different components or subsystems, ultimately contributing to enhanced interoperability and system reliability.
To get better understanding, let us take a practical example using a KUKA robot and a Roboception vision sensor as an example of an external system:
Assume that the supportive system is sending the errorIDs using the variable suppError which has for example the following values: 3000, 3001, 3002.
But our robot local error ID can start from 100 so the above errors must have the following IDs: 100,101,102.

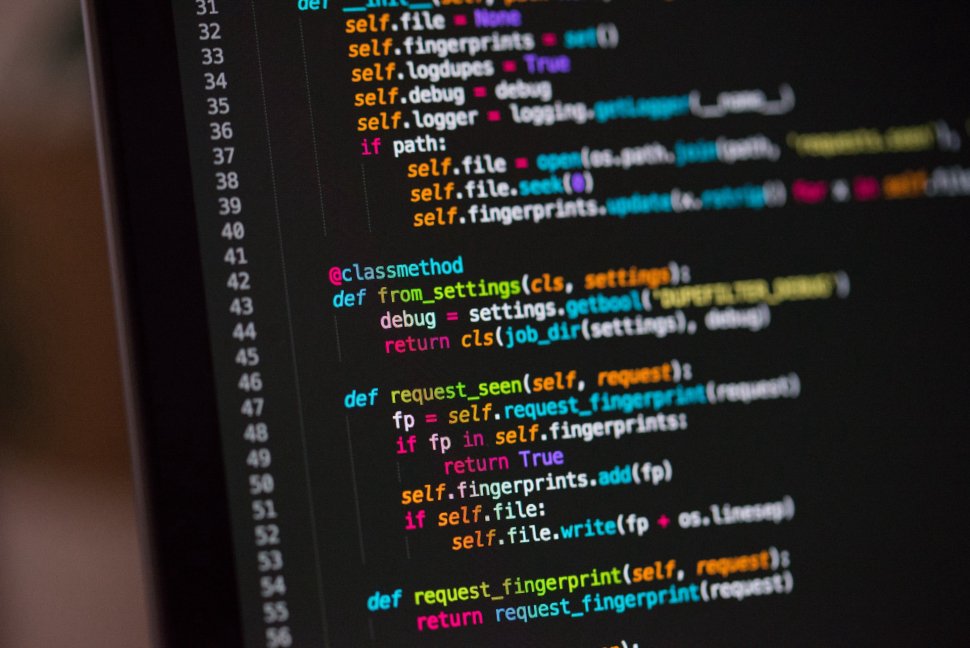
To automate this mapping, we create a start value variable called (i_startValueID) and we give it the value of our start value which is 100 then using the following function the mapping will be done. Here is a code snippet.
![]()
